About Soft Robotics
What is Soft Robotics?
Soft robotics is a sub field of robotics that focuses on constructing robots from compliant or flexible materials rather than traditionally stiff components. Using “soft” components lets robots move in a manner similar to biological organisms, allowing them to operate in a wider range of environments.
Why Soft Robotics?
As technology continues to advance, people are spending more time in proximity to robots. To ensure accurate movements and structural integrity, robots not intended for use around humans are often designed with stiff materials. Unfortunately, the use of structurally stiff robots increases the risk of damage to their working environment and injury to the people working with them. Consequentially, robotic researchers have recently focused on the development of “soft” robots that can work safely in tandem with humans and complete a variety of simple tasks, including feeding disabled individuals. Thanks to their contact-friendly nature, soft robots can work alongside humans without the risk of accidents associated with traditional industrial robots.
What We Do
To mitigate the challenges surrounding traditionally rigid robots operating in homes, one type of soft robot relies on the use of soft actuators known as Fiber Reinforced Elastomeric Enclosures (FREEs). FREEs are a subgroup of pneumatically controlled compliant structures that can remain inherently soft while still applying various forces and torques and deforming freely. By varying the fiber angle of FREE’s, we can achieve a wide range of motions. Individual actuators can produce motions including expansion, extension, and rotation. Researching the movement and control of FREEs is integral to advancing the field of soft robotics. FREEs can contribute to the precise movements necessary for soft robots to accomplish tasks while remaining flexible and relatively harmless to objects they contact.



In our lab, we design, build, and test FREEs to assess their performance. Through Experimentation, we determine the accuracy of FREE movements and what variables must change to improve control. This includes not only analysis of a single FREE, but also involves research into the performance of multiple FREEs when tethered together to form a larger module. These modules can eventually be connected to form a robotic arm which may perform simple tasks such as feeding an elderly or disabled person. The parameters we test include latency, accuracy, and control inputs as the arm performs simple maneuvers. See below for a rendering of the envisioned arm.
Demonstrations
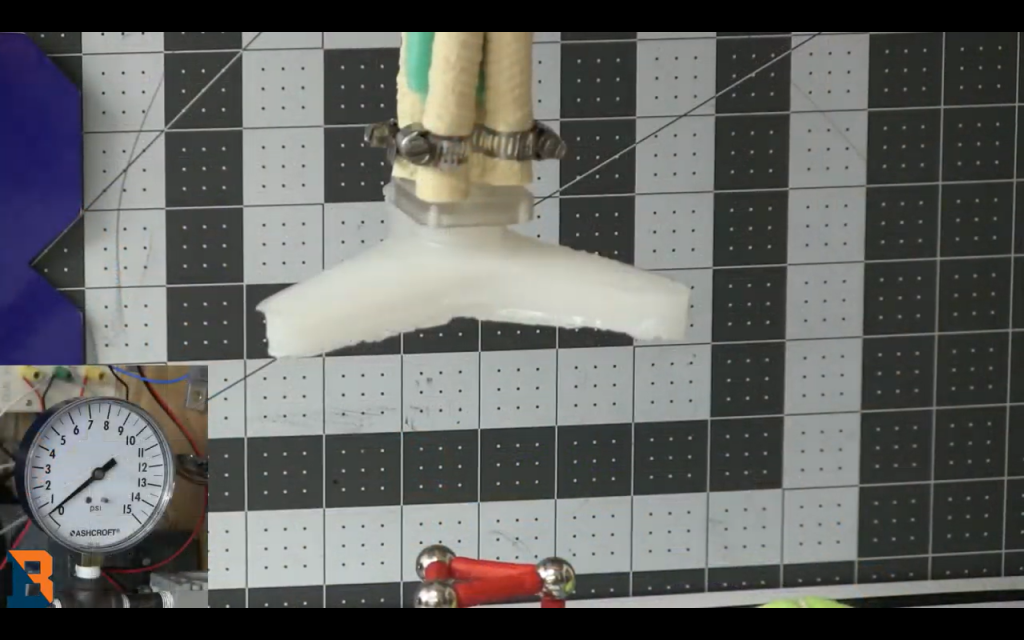
Gripper Demo
https://www.youtube.com/watch?v=7axoJhb7Q7Q&feature=youtu.be The demo above was created to showcase the silicone pneumatic gripper we created to fit at the end of a FREE module. While the gripper is functional, its gripping radius is still quit large so it is limited. Additionally, the excess silicone attached to the end of the module significantly limits its range of…
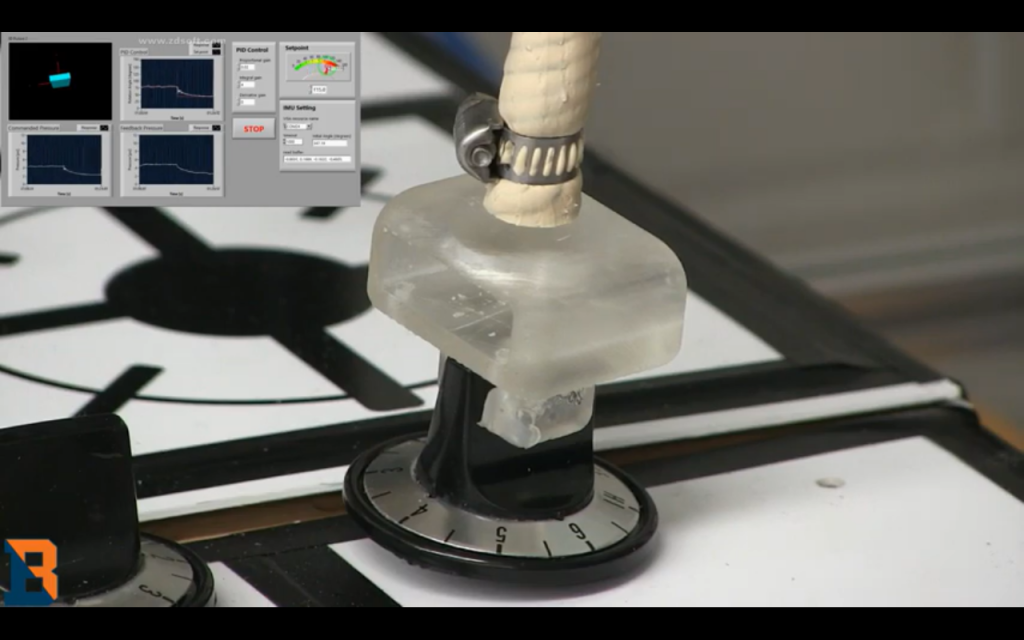
Cooking Demonstration
https://www.youtube.com/watch?v=gT5bpmcvvNI&feature=youtu.be&ab_channel=BucknellSoftRobotics The demonstration above was created to illustrate one of the potential applications of FREEs. As an in-home assistant, helping to prepare meals could be a vital function for those unable to cook for themselves.
Check out out YouTube channel for more videos and demonstrations.
