The lab took a trip to Michigan University last weekend to meet up with our partners and tour the school. Among other things, we got to see a demo of the Cassie biped robot that Michigan has been working on a controller for.
Categories
The lab took a trip to Michigan University last weekend to meet up with our partners and tour the school. Among other things, we got to see a demo of the Cassie biped robot that Michigan has been working on a controller for.
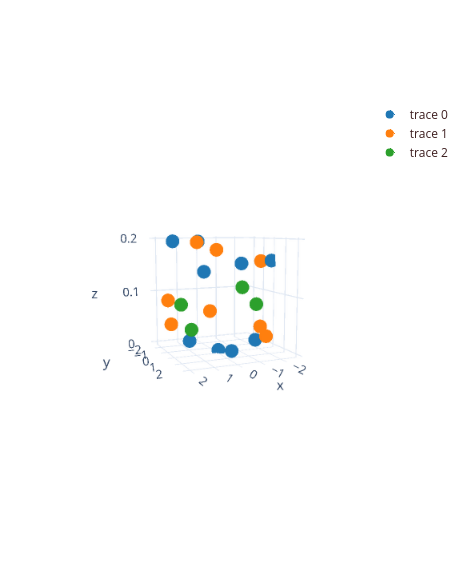
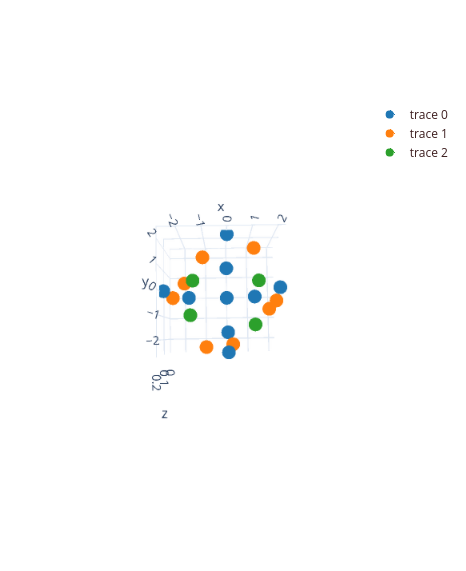
Back in the lab today. I was recording some more data on the now shortened FREE module and came across a couple problems. First, the software I was using to plot the points did not allow me to change the scale of the axes, so the scatter plot looks flat no matter what. I switched to using a website called Plotly instead. Second, I broke another FREE… It didn’t pop like the first one but the outer latex coating broke and the tube started to balloon. I’ve covered the spot with electrical tape for the moment and it doesn’t seem like it will break again right away but I’m hoping to get a new set of FREEs to work with soon. Below is my updated data.
The other day I was taking videos of the FREE module to analyze in Tracker, I went up to 15 PSI like I had been doing, and I accidentally popped one…Fortunately it popped at the end so I could cut off the broken part and just make the whole module shorter. Though I didn’t finish the first dataset, I can still compare it to data from the shorter module and examine how length affects the range of motion.
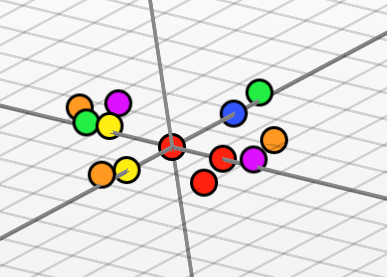
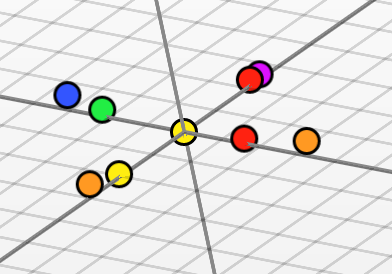
Our current focus is trying to create a video demonstration of FREE rotation by having one solve a combination lock. Meanwhile, I have been gathering positional data on our 70 degree wrapped four-FREE module. My lab partner Ryan is working on getting a camera working for live motion tracking, but until then I’m using a video analysis program called Tracker to record the motion.
This blog lets you keep up to date about the progress we have made and the daily goings on in the lab. If you have any questions, don’t hesitate to reach out through email or by sending us a message from the home page.